Difference between revisions of "Key technologies"
Jump to navigation
Jump to search
| Line 1: | Line 1: | ||
| + | Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery: | ||
| + | |||
{| | {| | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| Line 7: | Line 9: | ||
{| | {| | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| − | |[[File:umm_tech.jpg|x200px|sans_cadre|]] || || || <big> '''Hydraulic actuation''' </big> to build compact and efficient actuated tools in the medical environment. | + | |[[File:umm_tech.jpg|x200px|sans_cadre|]] || || || <big> '''Hydraulic actuation''' </big> to build compact and efficient actuated tools in the medical environment. Picture on the left represents CAD designs of hydraulically-driven surgical tools introduced by UMM, compatible with surgical applications in terms of size and force generation (©UMM). |
|} | |} | ||
| Line 13: | Line 15: | ||
{| | {| | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| − | |[[File:hfu_tech.jpg|x200px|sans_cadre|]] || || || <big> '''Tactile transducer design and manufacturing''' </big> using MEMS technology. | + | |[[File:hfu_tech.jpg|x200px|sans_cadre|]] || || || <big> '''Tactile transducer design and manufacturing''' </big> using MEMS technology. Picture on the left describes the multi-scale design of tactile transducer as developed by HFU (©UMM). |
|} | |} | ||
| + | {| | ||
| + | |- style="vertical-align: top;" | ||
| + | |[[File:fhnw_tech.jpg|x200px|sans_cadre|]] || || || <big> '''3D printing of Ti and NiTi''' </big>. Complex metal alloys can be produced by FHNW with control of microstructure and material properties. Picture on the left represent sample parts obtained using in-house equipments of FHNW (©FHNW). | ||
| + | |} | ||
{| | {| | ||
| − | |- | + | |- style="vertical-align: top;" |
| − | + | |[[File:epfl_instantlab_tech.jpg|x200px|sans_cadre|]] || || || <big> '''Instrumented surgical tools ''' </big>. Integration of optical technologies in surgical tools opens the way to precision increase in robotised tasks for medical application. Picture on the left represents proofs- (©FHNW). | |
|} | |} | ||
| Line 27: | Line 33: | ||
* 3D printing technologies and their combination. Multimaterial polymer production and metal printing are being considered for manufacturing of robotic technology. | * 3D printing technologies and their combination. Multimaterial polymer production and metal printing are being considered for manufacturing of robotic technology. | ||
* Hydraulic actuation and compliant mechanisms. Their combination is considered to design efficient robotic structures. | * Hydraulic actuation and compliant mechanisms. Their combination is considered to design efficient robotic structures. | ||
| − | * | + | * |
* Tactile feedback technology for providing new information to the radiologist. | * Tactile feedback technology for providing new information to the radiologist. | ||
Revision as of 15:23, 10 September 2017
Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery:
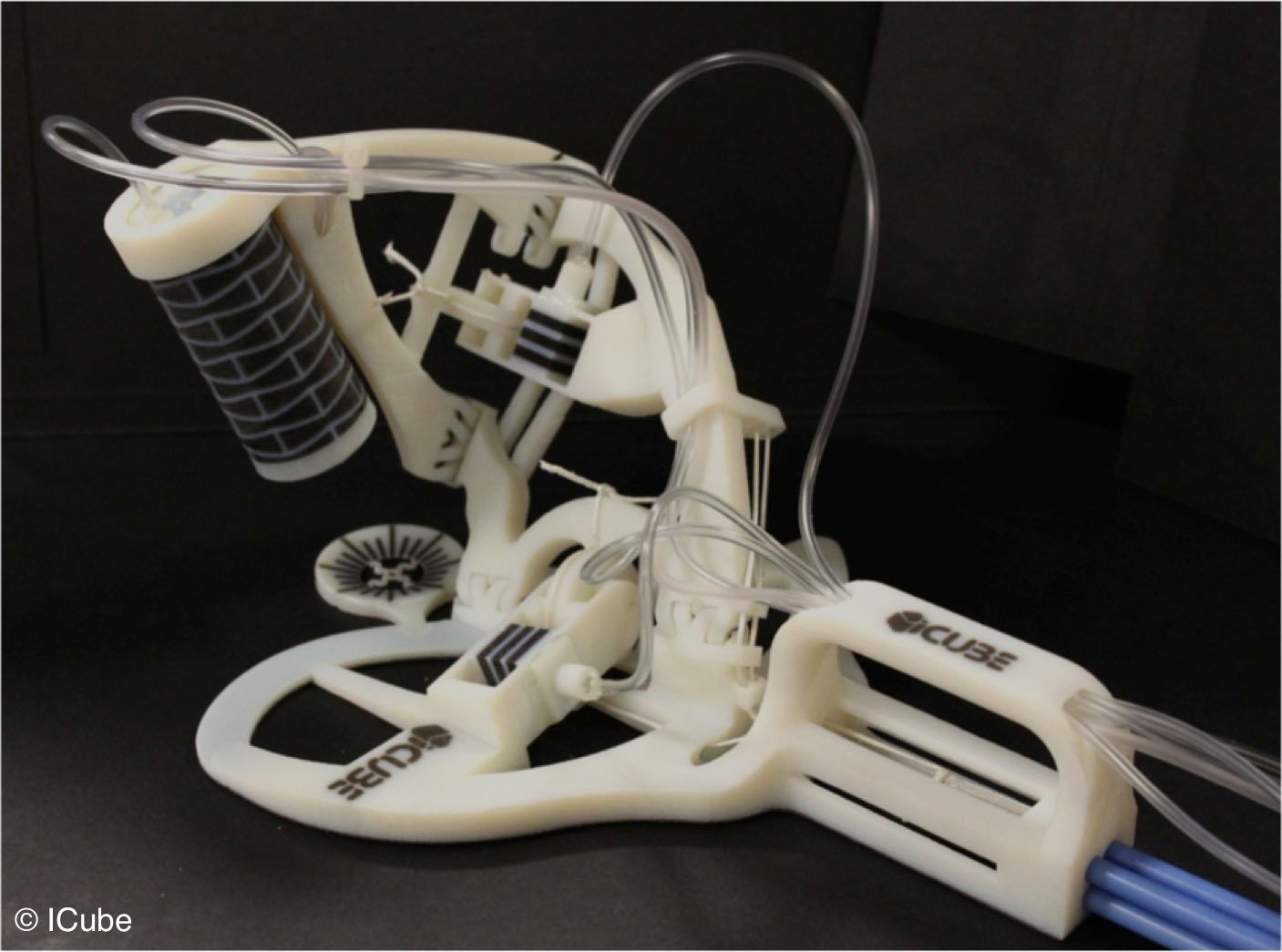 |
3D Printing of multimaterial polymer structures for the design of highly-integrated robotic structures. Picture on the left represents a proof-of-concept developed at ICube-INSA Strasbourg (©ICUBE). |
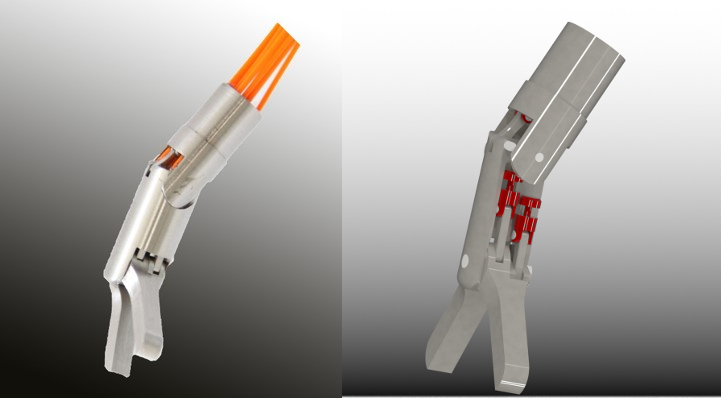 |
Hydraulic actuation to build compact and efficient actuated tools in the medical environment. Picture on the left represents CAD designs of hydraulically-driven surgical tools introduced by UMM, compatible with surgical applications in terms of size and force generation (©UMM). |
| File:Hfu tech.jpg | Tactile transducer design and manufacturing using MEMS technology. Picture on the left describes the multi-scale design of tactile transducer as developed by HFU (©UMM). |
{kind=link}
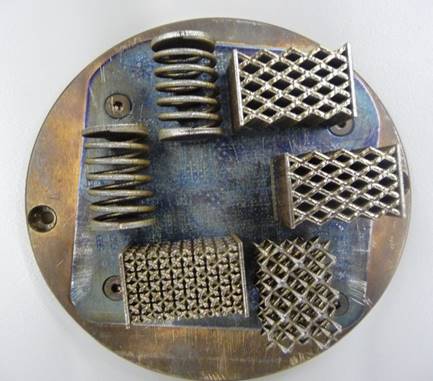 |
3D printing of Ti and NiTi . Complex metal alloys can be produced by FHNW with control of microstructure and material properties. Picture on the left represent sample parts obtained using in-house equipments of FHNW (©FHNW). |
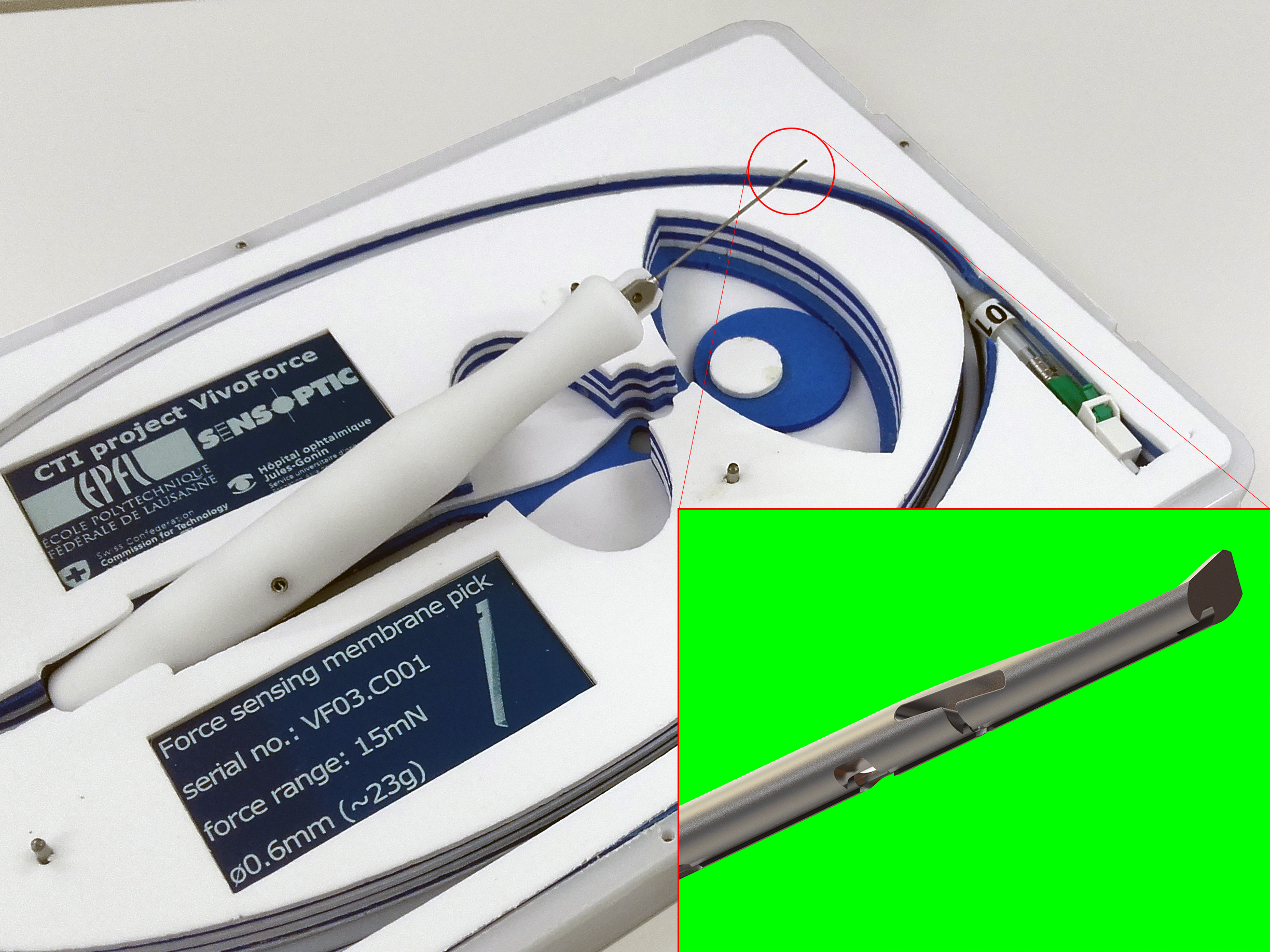 |
Instrumented surgical tools . Integration of optical technologies in surgical tools opens the way to precision increase in robotised tasks for medical application. Picture on the left represents proofs- (©FHNW). |
Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery:
- 3D printing technologies and their combination. Multimaterial polymer production and metal printing are being considered for manufacturing of robotic technology.
- Hydraulic actuation and compliant mechanisms. Their combination is considered to design efficient robotic structures.
- Tactile feedback technology for providing new information to the radiologist.