Difference between revisions of "Key technologies"
Jump to navigation
Jump to search
(Created page with "Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery. * It is proposed to combine 3D multi...") |
|||
| (25 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery | + | [[fr:Technologies clés]] |
| + | [[de:Schlüsseltechnologien]] | ||
| + | Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery: | ||
| − | |||
| − | + | {| | |
| + | |- style="vertical-align: top;" | ||
| + | |[[File:spirit_robot.png|300px|sans_cadre|]] || || || <big> '''3D Printing of multimaterial polymer structures''' </big> for the design of highly-integrated robotic structures. Picture on the left represents a proof-of-concept developed at INSA Strasbourg - ICube lab (©ICUBE). | ||
| − | + | |} | |
| + | |||
| + | {| | ||
| + | |- style="vertical-align: top;" | ||
| + | |[[File:hfu_tech.png|300px|sans_cadre|]] || || || <big> '''Tactile transducer design and manufacturing''' </big> using MEMS technology, with hydrostatic design for efficient feedback. Picture on the left describes the multi-scale design of tactile transducer as developed by HFU (©HFU). | ||
| + | |} | ||
| + | |||
| + | {| | ||
| + | |- style="vertical-align: top;" | ||
| + | |[[File:umm_tech.jpg|300px|sans_cadre|]] || || || <big> '''Hydraulic actuation''' </big> to build compact and efficient actuated tools in the medical environment. Picture on the left represents CAD designs of hydraulically-driven surgical tools introduced by UMM, compatible with surgical applications in terms of size and force generation (©UMM). | ||
| + | |||
| + | |} | ||
| + | |||
| + | |||
| + | {| | ||
| + | |- style="vertical-align: top;" | ||
| + | |[[File:fhnw_tech.jpg|300px|sans_cadre|]] || || || <big> '''3D printing of Ti and NiTi.''' </big> Complex metal alloys can be produced by FHNW with control of microstructure and material properties. Picture on the left represent sample parts obtained using in-house equipments of FHNW (©FHNW). | ||
| + | |} | ||
| + | |||
| + | {| | ||
| + | |- style="vertical-align: top;" | ||
| + | |[[File:epfl_instantlab_tech.jpg|300px|sans_cadre|]] || || || <big> '''Instrumented surgical tools. ''' </big> Integration of optical technologies in surgical tools opens the way to precision increase in robotised tasks for medical application. Picture on the left represents micro-surgery tool with embedded force sensor to improve tissue manipulation (©EPFL). | ||
| + | |} | ||
Latest revision as of 17:47, 7 December 2017
Several key technologies are developed thanks to SPIRITS for interventional radiology and more generally for hybrid image-guided surgery:
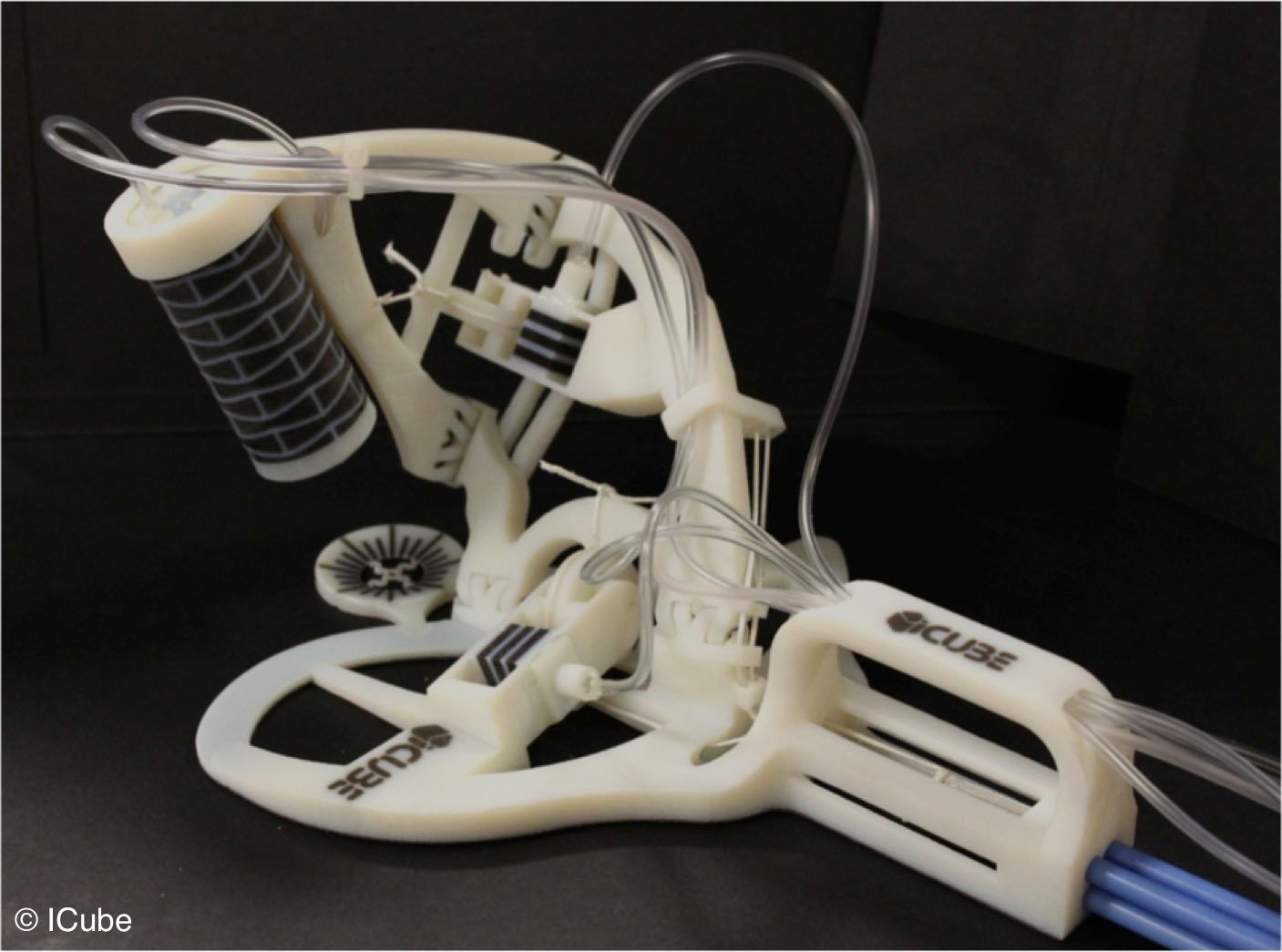 |
3D Printing of multimaterial polymer structures for the design of highly-integrated robotic structures. Picture on the left represents a proof-of-concept developed at INSA Strasbourg - ICube lab (©ICUBE). |
 |
Tactile transducer design and manufacturing using MEMS technology, with hydrostatic design for efficient feedback. Picture on the left describes the multi-scale design of tactile transducer as developed by HFU (©HFU). |
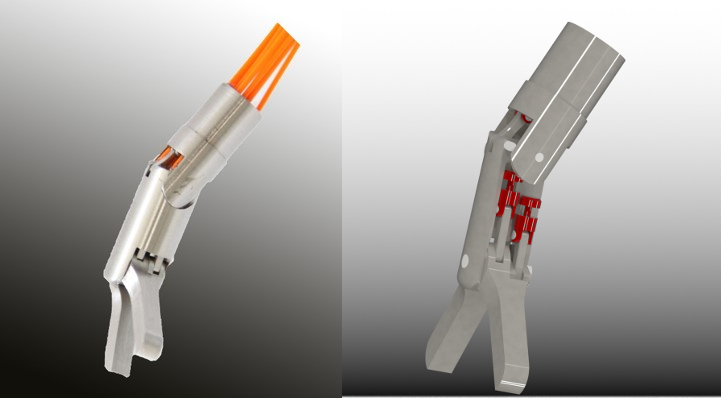 |
Hydraulic actuation to build compact and efficient actuated tools in the medical environment. Picture on the left represents CAD designs of hydraulically-driven surgical tools introduced by UMM, compatible with surgical applications in terms of size and force generation (©UMM). |
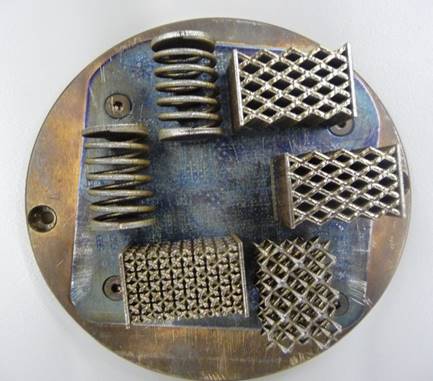 |
3D printing of Ti and NiTi. Complex metal alloys can be produced by FHNW with control of microstructure and material properties. Picture on the left represent sample parts obtained using in-house equipments of FHNW (©FHNW). |
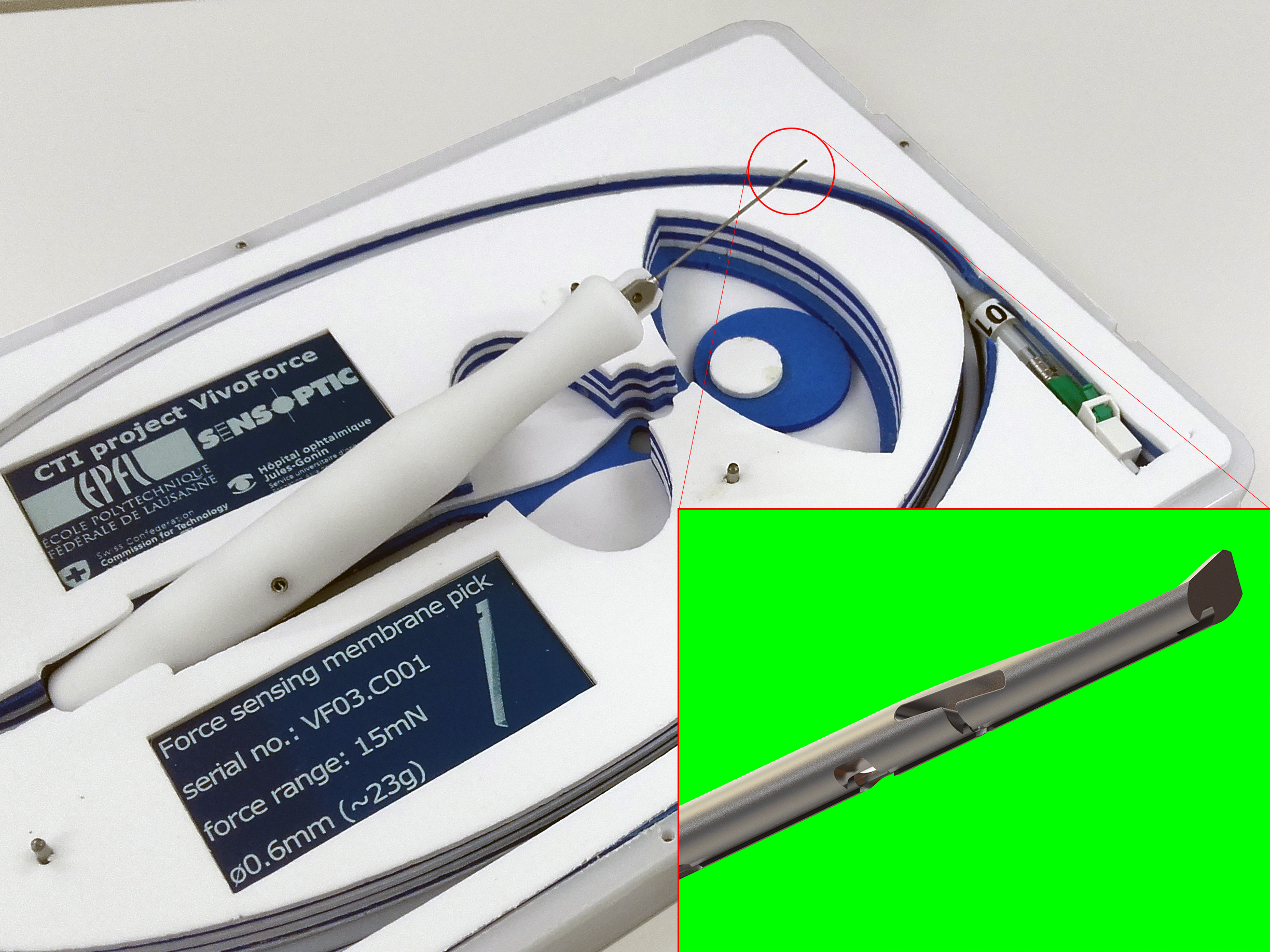 |
Instrumented surgical tools. Integration of optical technologies in surgical tools opens the way to precision increase in robotised tasks for medical application. Picture on the left represents micro-surgery tool with embedded force sensor to improve tissue manipulation (©EPFL). |